PRIMT: Preference-based Reinforcement Learning with Multimodal Feedback and Trajectory Synthesis from Foundation Models
Ruiqi Wang†, Dezhong Zhao†, Ziqin Yuan†, Tianyu Shao, Guohua Chen, Dominic Kao, Sungeun Hong, and Byung-Cheol Min.
Advances in Neural Information Processing Systems (NeurIPS), San Diego, USA, December 2025.
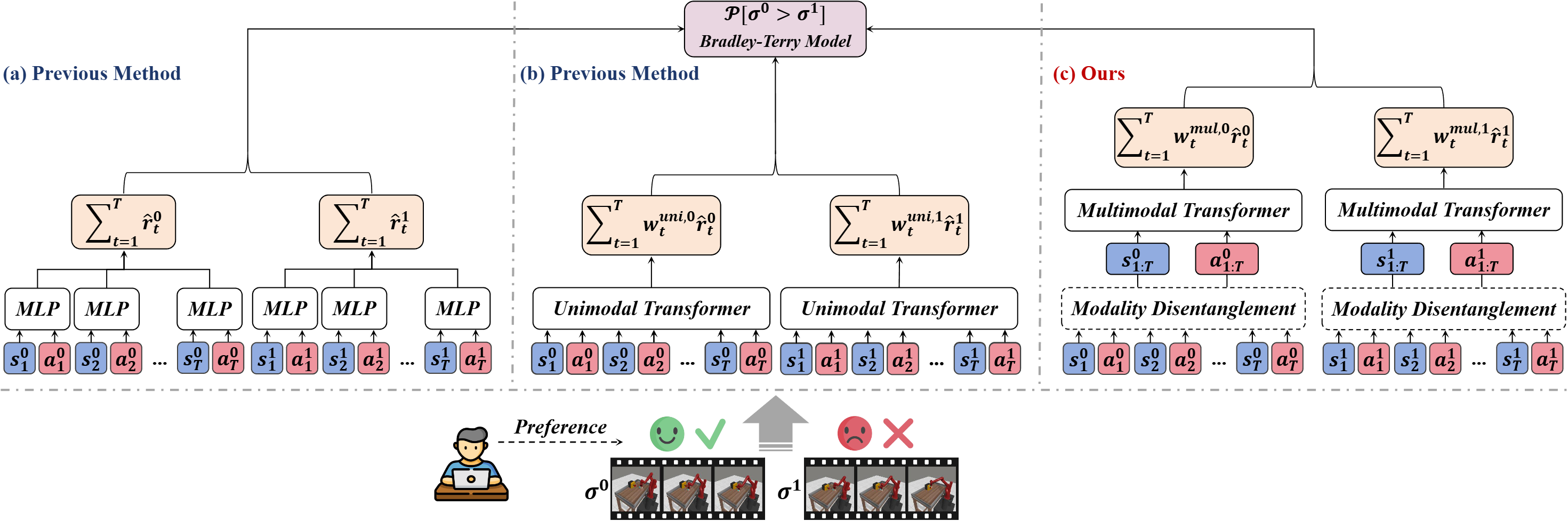
PrefMMT: Modeling Human Preferences in Preference-based Reinforcement Learning with Multimodal Transformers
Dezhong Zhao†§, Ruiqi Wang†, Dayoon Suh, Taehyeon Kim, Ziqin Yuan, Byung-Cheol Min, and Guohua Chen.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, October 2025.
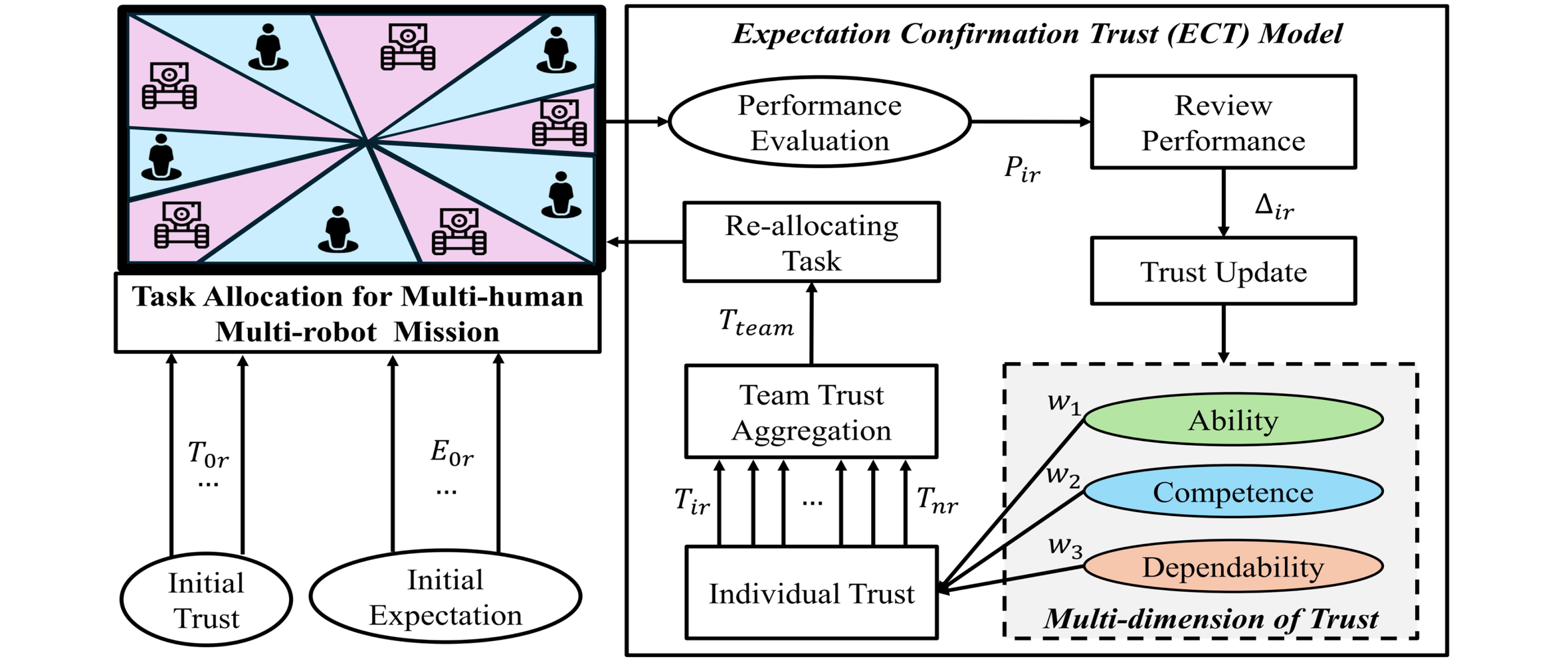
Modeling and Evaluating Trust Dynamics in Multi-Human Multi-Robot Task Allocation
Ike Obi, Ruiqi Wang, Wonse Jo, and Byung-Cheol Min.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, October 2025.
Personalization in Human-Robot Interaction through Preference-based Action Representation Learning
Ruiqi Wang†, Dezhong Zhao†, Dayoon Suh§, Ziqin Yuan, Guohua Chen, and Byung-Cheol Min.
IEEE International Conference on Robotics and Automation (ICRA), Atlanta, USA, 19-23 May, 2025.
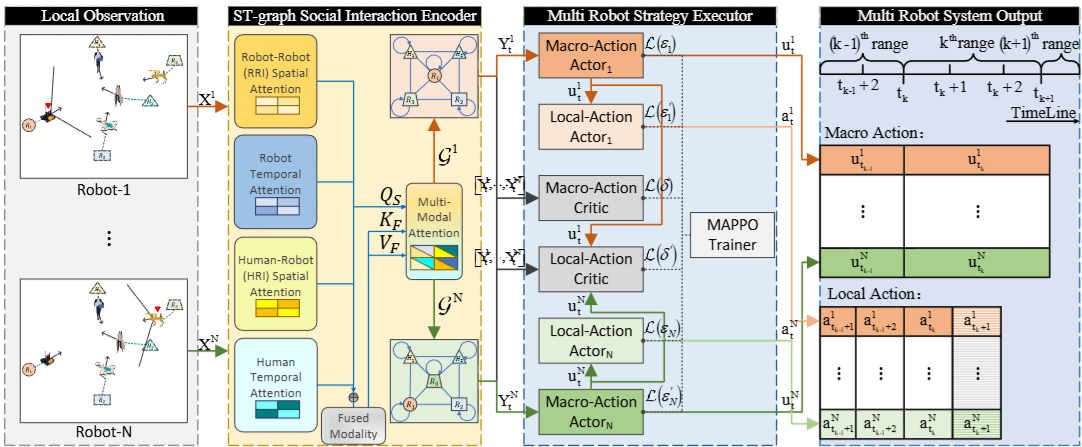
Adaptive Task Allocation in Multi-Human Multi-Robot Teams under Team Heterogeneity and Dynamic Information Uncertainty
Ziqin Yuan†§, Ruiqi Wang†, Taehyeon Kim, Dezhong Zhao, Ike Obi, and Byung-Cheol Min.
IEEE International Conference on Robotics and Automation (ICRA), Atlanta, USA, 19-23 May, 2025.
PrefCLM: Enhancing Preference-based Reinforcement Learning with Crowdsourced Large Language Models
Ruiqi Wang, Dezhong Zhao, Ziqin Yuan, Ike Obi, and Byung-Cheol Min.
IEEE Robotics and Automation Letters, Vol. 10, No. 3, pp. 2486-2493, March 2025.
Cognitive Load-based Affective Workload Allocation for Multi-Human Multi-Robot Teams
Wonse Jo, Ruiqi Wang, Baijian Yang, Dan Foti, Mo Rastgaar, and Byung-Cheol Min.
IEEE Transactions on Human-Machine Systems, Vol. 55, No. 1, pp. 23-36, February 2025.
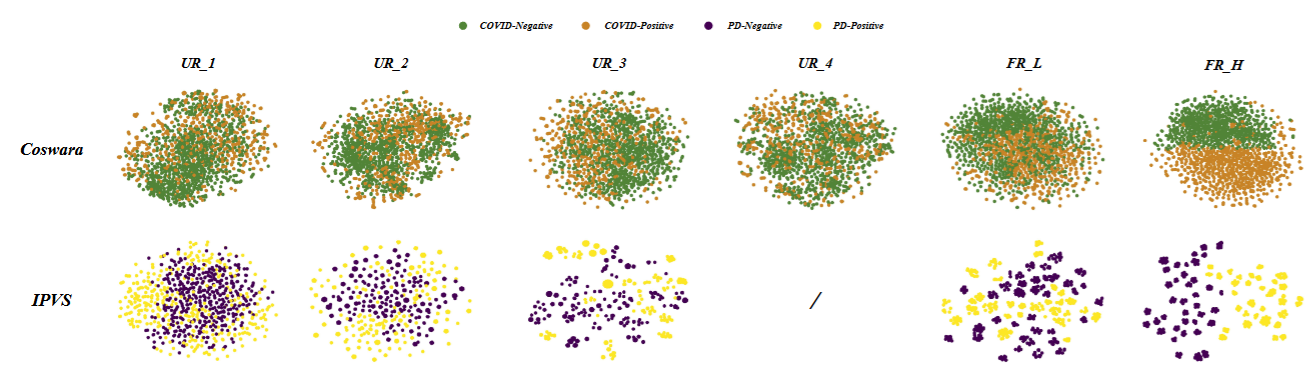
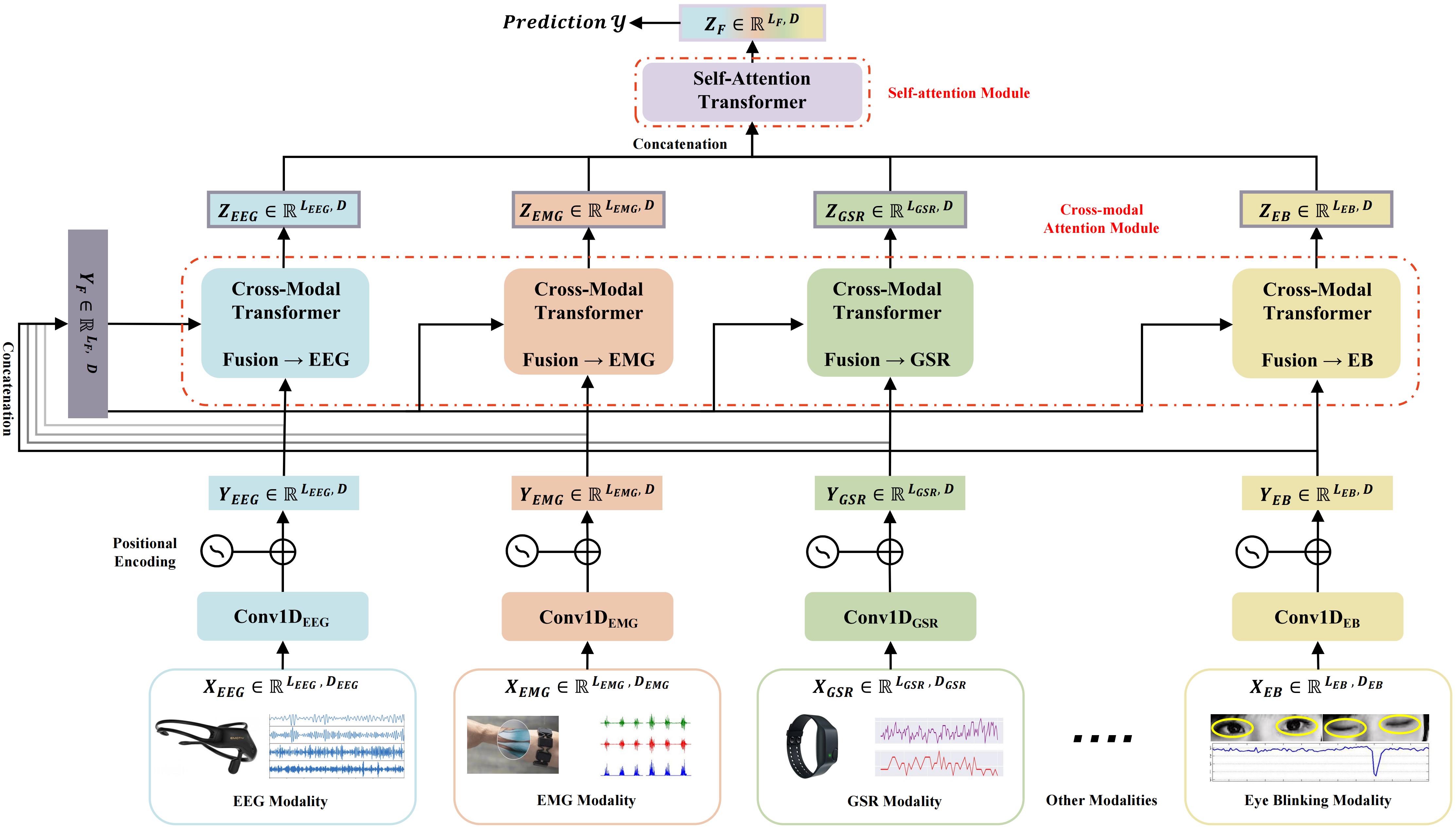
Multimodal Audio-based Disease Prediction with Transformer-based Hierarchical Fusion Network
Jinjin Cai†, Ruiqi Wang†, Dezhong Zhao, Ziqin Yuan, Victoria McKenna, Aaron Friedman, Rachel Foot, Susan Storey, Ryan Boente, Sudip Vhaduri, and Byung-Cheol Min.
IEEE Transactions on Audio, Speech, and Language Processing, vol. 33, pp. 1170-1182, February 2025.
MOCAS: A Multimodal Dataset for Objective Cognitive Workload Assessment on Simultaneous Tasks
Wonse Jo†, Ruiqi Wang†, Go-Eum Cha, Su Sun, Revanth Senthilkumaran§, Daniel Foti, and Byung-Cheol Min.
IEEE Transactions on Affective Computing, vol. 16, no. 1, pp. 116-132, Jan.-March 2025.