
Selected Publications
Year
Venue
Theme
Showing 16 of 16 publications
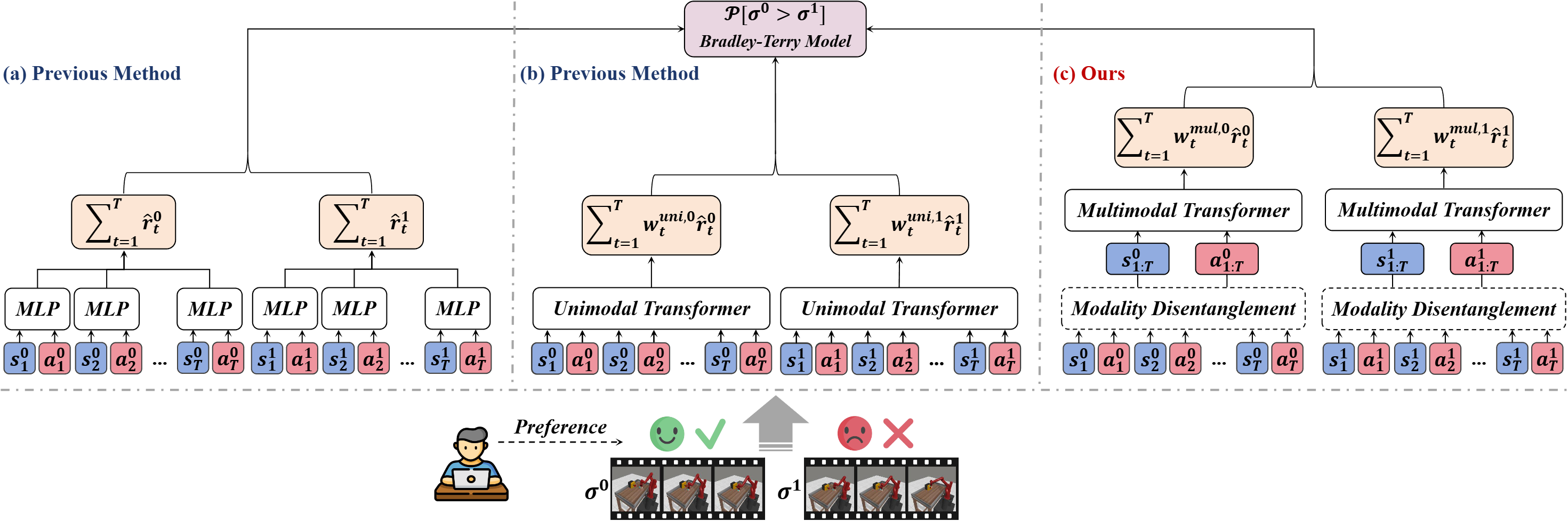
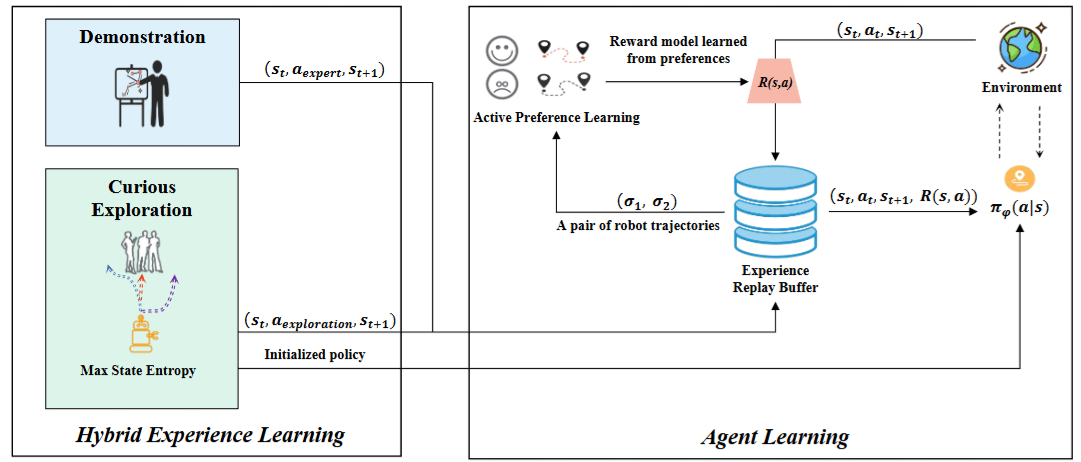
Interactive & Value-Aligned Robot Learning
Human State-Aware Interaction
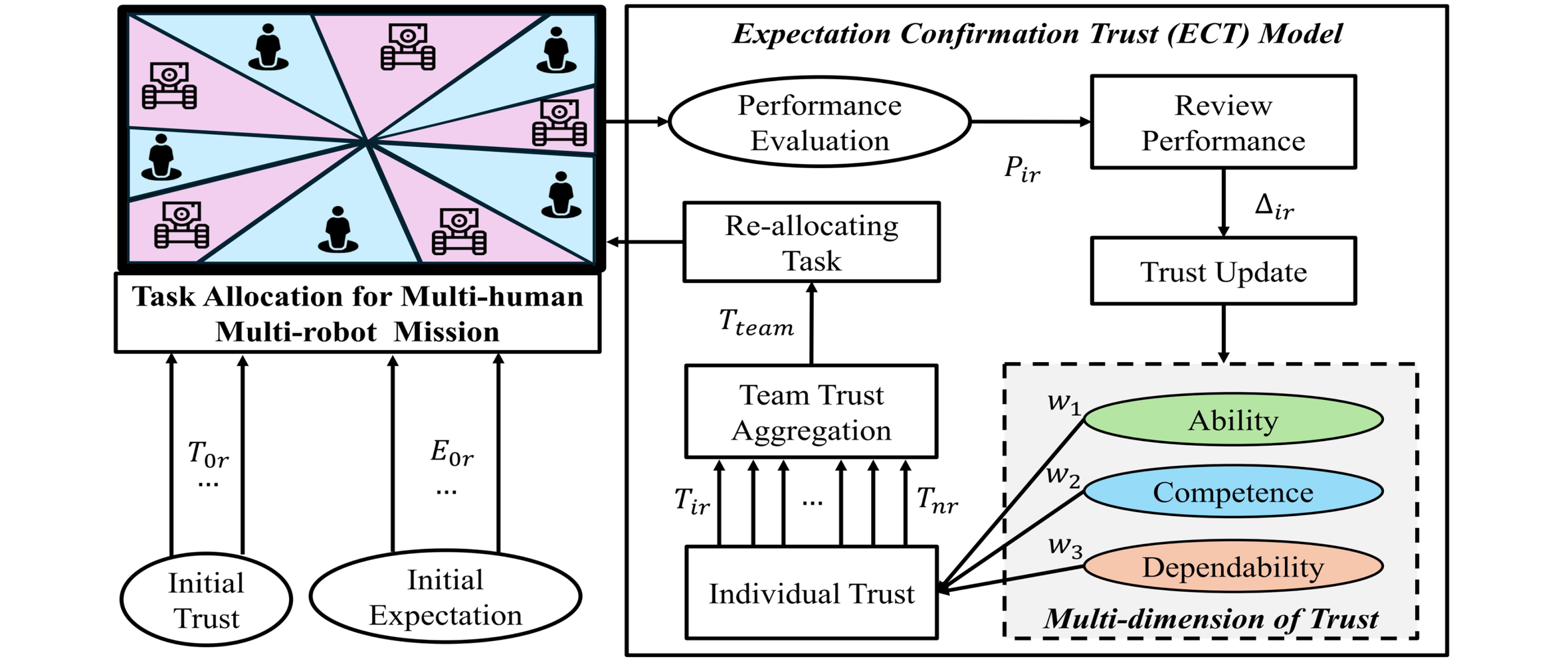
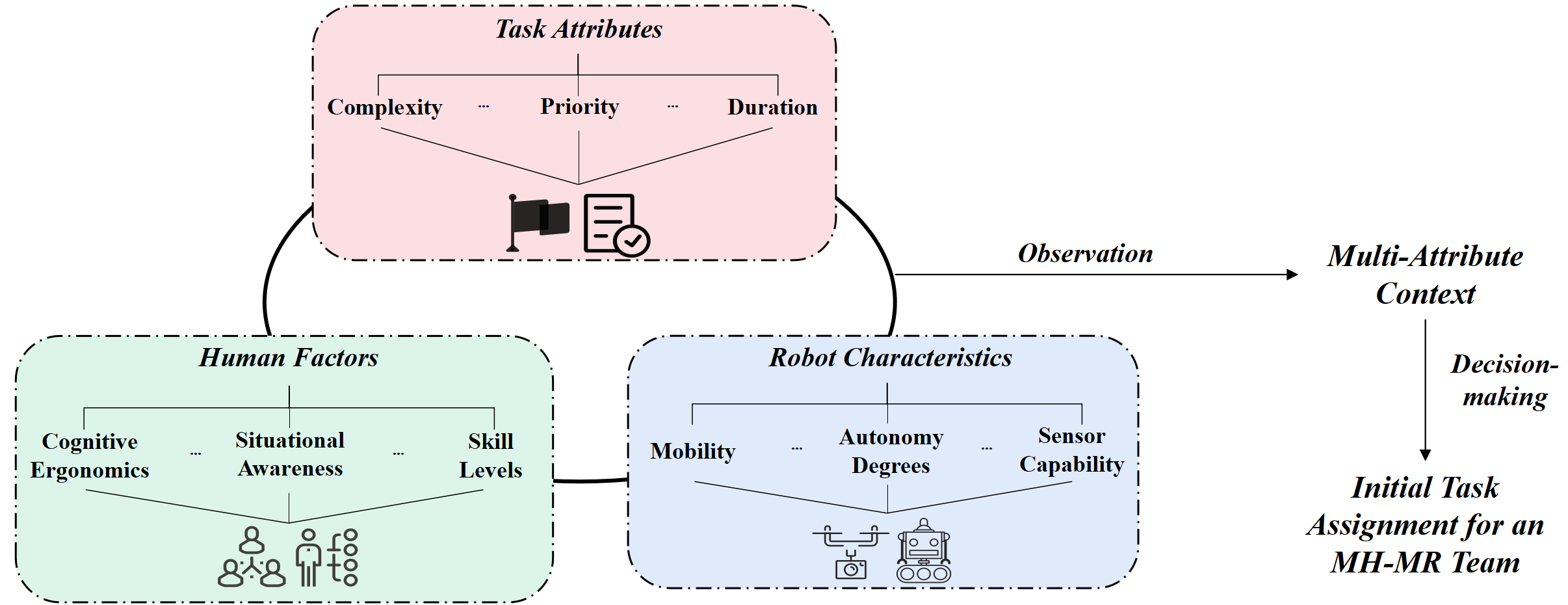
Heterogeneity-Aware Human-Robot Teaming
Interdisciplinary Collaboration
†: Equal contribution · §: Work I mentored
× ![Enlarged view]()